
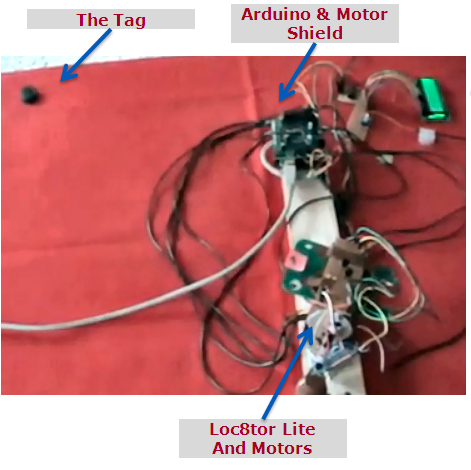
So here is a picture of the final assembly; best to look at the video to see the full operation but this picture shows the tag top left, the Arduino, motor shield and LCD display top right and the Loc8tor Lite assembly bottom.
The results on the LCD will look like this; The H is the number of steps required on the horizontal motor and the V is the number of steps on the vertical motor. Steps run from 1 to 48 (360 degrees) on the horizontal and 1 to 18 on the vertical (about third of the total rotation).
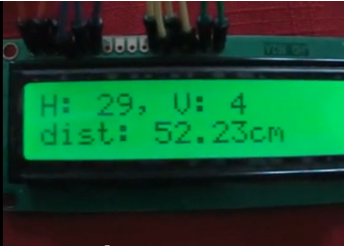
Distance is calculated using an sort of inverse square law based on some line of sight calibration measurements I did earlier (see the getEstimatedDistance() function in the code).
